Введение в проблему планирования сложных визуальных задач
С развитием технологий и увеличением числа роботов, способных функционировать в реальных условиях, все более актуальной становится задача планирования сложных визуальных задач. Это особенно важно для динамичных и изменяющихся сред, где требуется гибкое и быстрое принятие решений. Новая система, разработанная в MIT, обещает стать революцией в этой области.
Технология VLMFP: как это работает
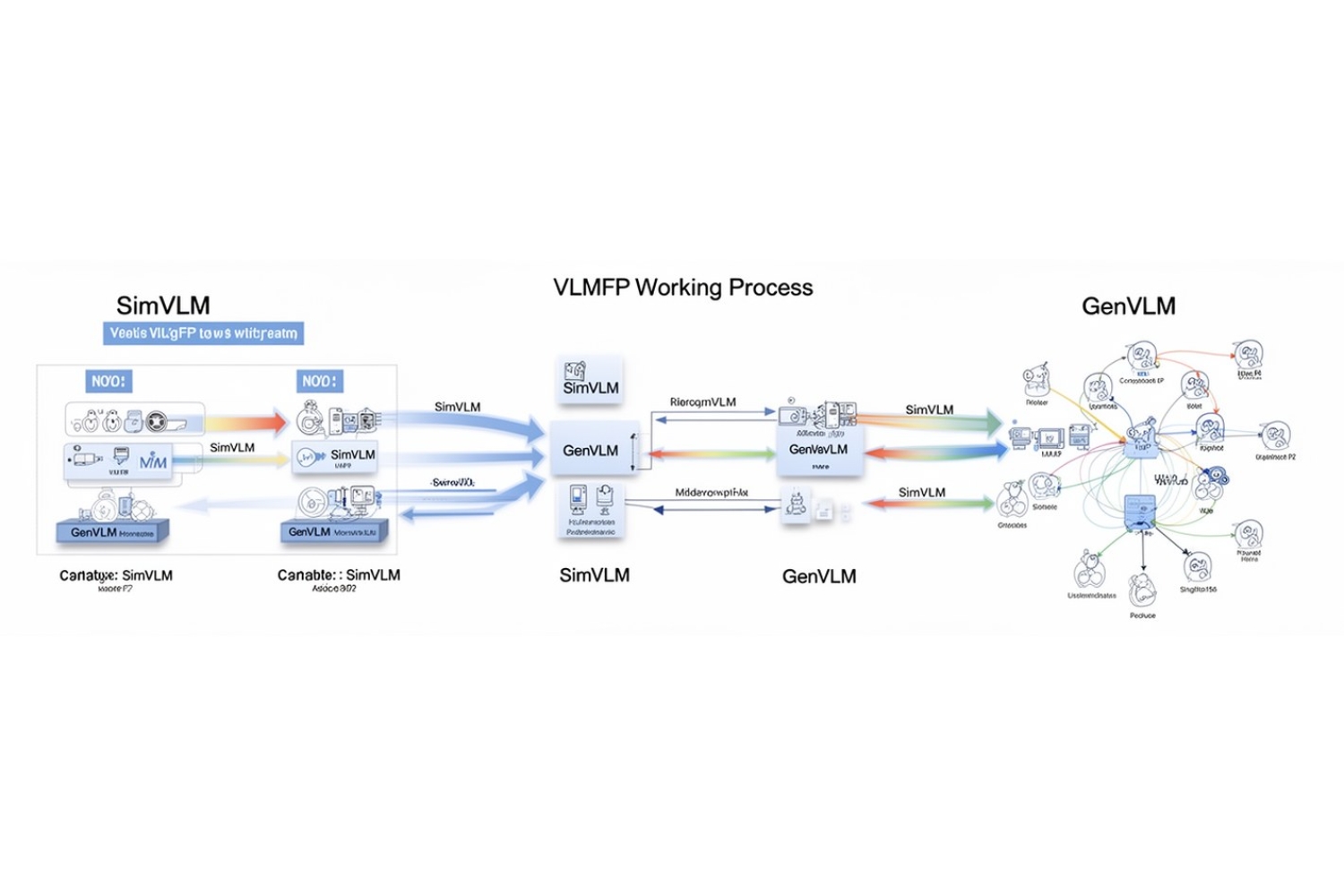
Гибридная система VLMFP (Vision-Language Model-guided Formal Planning) объединяет преимущества моделей обработки изображений и текстов с мощными возможностями формальных планировщиков. Основная идея заключается в использовании двух специализированных моделей, которые совместно преобразуют визуальные задачи в формат, пригодный для классического планировочного ПО.
Этапы работы системы
- SimVLM: Эта модель анализирует изображение, описывает его на естественном языке и создает последовательность действий для достижения цели.
- GenVLM: Получив описание от SimVLM, эта модель генерирует файлы в языке Planning Domain Definition Language (PDDL), которые затем используются классическим планировщиком для составления плана.
Преимущества гибридного подхода
Система VLMFP отличается высокой эффективностью, достигая успеха в 70% случаев, что более чем вдвое превышает результаты лучших существующих методов. Кроме того, она способна решать новые, ранее не встречавшиеся задачи, что делает ее подходящей для использования в реальных условиях.
Одним из ключевых преимуществ является способность системы обобщать знания и применяться к различным сценариям в пределах одной области. Это достигается благодаря особенностям PDDL, где файл домена остается неизменным для всех задач в данной среде.
Перспективы и возможные применения
Система VLMFP уже продемонстрировала свою эффективность в таких задачах, как многороботное взаимодействие и роботизированная сборка. В будущем исследователи планируют усовершенствовать систему для работы с более сложными сценариями и развивать методы, предотвращающие ошибки и искажения, возникающие в моделях VLM.
Эта работа открывает новые горизонты для применения ИИ в планировании и управлении, предлагая гибкие решения для разнообразных индустрий. От робототехники до автономного вождения – возможности VLMFP поистине безграничны.
В долгосрочной перспективе такие системы могут выступать в роли агентов, способных решать значительно более сложные задачи, что подчеркивает важность данного исследования.